





Copyright:Auto baodian.com
Your location:Home >Automotive News >
Time:2022-06-28 17:00:42Source:
In recent years, artificial intelligence systems have been widely deployed in areas such as autonomous vehicles, last-mile delivery, restaurant service, patient screening, hospital cleaning, meal preparation, building security, and warehouse packaging.
According to foreign media reports, engineers at the Massachusetts Institute of Technology (MIT) have developed a universal design tool for roboticists to improve self-driving robotic systems.The team devised an optimized code that can be applied to the simulation of nearly any self-driving robotic system and can be used to automatically identify how and where to tune the system to improve the robot's performance.
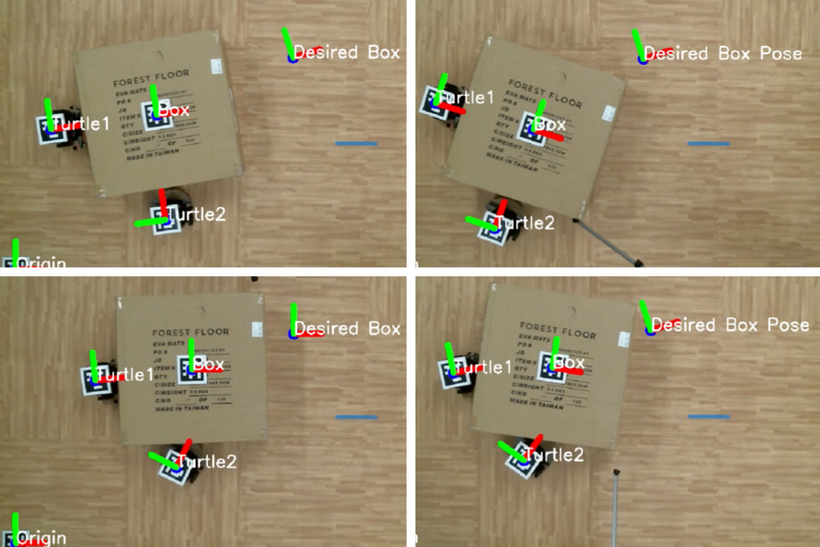
Image credit: MIT
The team showed that the tool was able to rapidly improve the performance of two very different autonomous driving systems: one in which a robot navigates a path between two obstacles, and the other in which two robots move a heavy box together.
The researchers hope that the new general optimizer can help speed up the development of autonomous driving systems, including walking robots and self-driving vehicles, soft and dexterous robots, and teams of collaborative robots.
inverted design
After observing the vast array of automated design tools available to other engineering disciplines, research members Charles Dawson, an MIT graduate student, and ChuChu Fan, an assistant professor in the MIT Department of Aeronautics and Astronautics, realized the need for a general optimization tool.
Typically, roboticists need to first develop a simulation system and its many interacting subsystems (such as planning, control, perception, and hardware components) to optimize the autonomous driving system, then adjust certain parameters of each component and run the simulation forward to see the How the system behaves in this scenario.
Only after running many scenarios through trial and error can roboticists determine the best combination of parameters to produce the desired performance.The process was tedious, over-customized, and time-consuming, so Dawson and Fan decided to make a change.
Researchers have developed an optimization framework, or computer code, that can automatically find and fine-tune existing self-driving systems to achieve desired results.
The core of the code is based on automatic differentiation or "autodiff" (a programming tool developed in the machine learning community and originally used to train neural networks).Autodiff can quickly and efficiently "evaluate derivatives" or detect any parameter changes in a computer program.Based on recent advances in autodiff programming, Dawson and Fan developed a general optimization tool for autonomous robotic systems.
Build better robots
The team tested their new tool on two separate self-driving robotic systems and found that the tool rapidly improved the performance of each system in laboratory experiments compared to traditional optimization methods.
The first system consists of a wheeled robot tasked with planning a path between two obstacles based on signals received from two beacons at different locations.The team tried to find the sweet spot for the beacons to create a clear path between obstacles.
They found that the new optimizer could quickly feed back through the robot's simulation and determine the best location for the beacon in 5 minutes, compared with 15 minutes for traditional methods.
The second system is more complex and involves two wheeled robots working together to push a box towards a target location.The simulation of this system includes more subsystems and parameters.Still, the team's tool effectively identified the steps the robot needed to complete its goal, an optimization process 20 times faster than traditional methods.
The team offers a download option for this universal optimizer, and plans to further improve the code for application to more complex systems, such as robots designed to interact with and work with humans.
Statement: the article only represents the views of the original author and does not represent the position of this website; If there is infringement or violation, you can directly feed back to this website, and we will modify or delete it.













Preferredproduct
Picture and textrecommendation
2022-06-28 17:00:42

2022-06-28 17:00:01




2022-06-28 16:54:44
Hot spotsranking
Wonderfularticles


2022-06-28 16:45:52

2022-06-28 16:42:13


2022-06-28 16:35:19
Popularrecommendations
